The Bear Trap (2024-2025)
The Bear Trap is a multirotor quadcopter designed to be a simple and reliable platform to carry out competition mission tasks such as payload drop, waypoint pathing, and target localization. The quadcopter airframe design consists of a top and bottom plate made of carbon fiber which sandwiches the motor boom arms in a stiff structure designed for simplicity. The stiff nature of the airframe design and the carbon fiber used helps reduce structural vibrations, which are detrimental to flight controller performance.
The powertrain consists of 4110 340kv motors motors generating acombined 10 kg thrust kilos of thrust, giving The Bear Trap a thrust to weight ratio of 2.5rwr. The powertrain was carefully selected to give plenty of headroom on thrust while still remaining extremely efficient for long waypoint to waypoint flights. The system is powered by four 4s 5200 mAh batteries in 2s2p Lithium Polymer batteries.
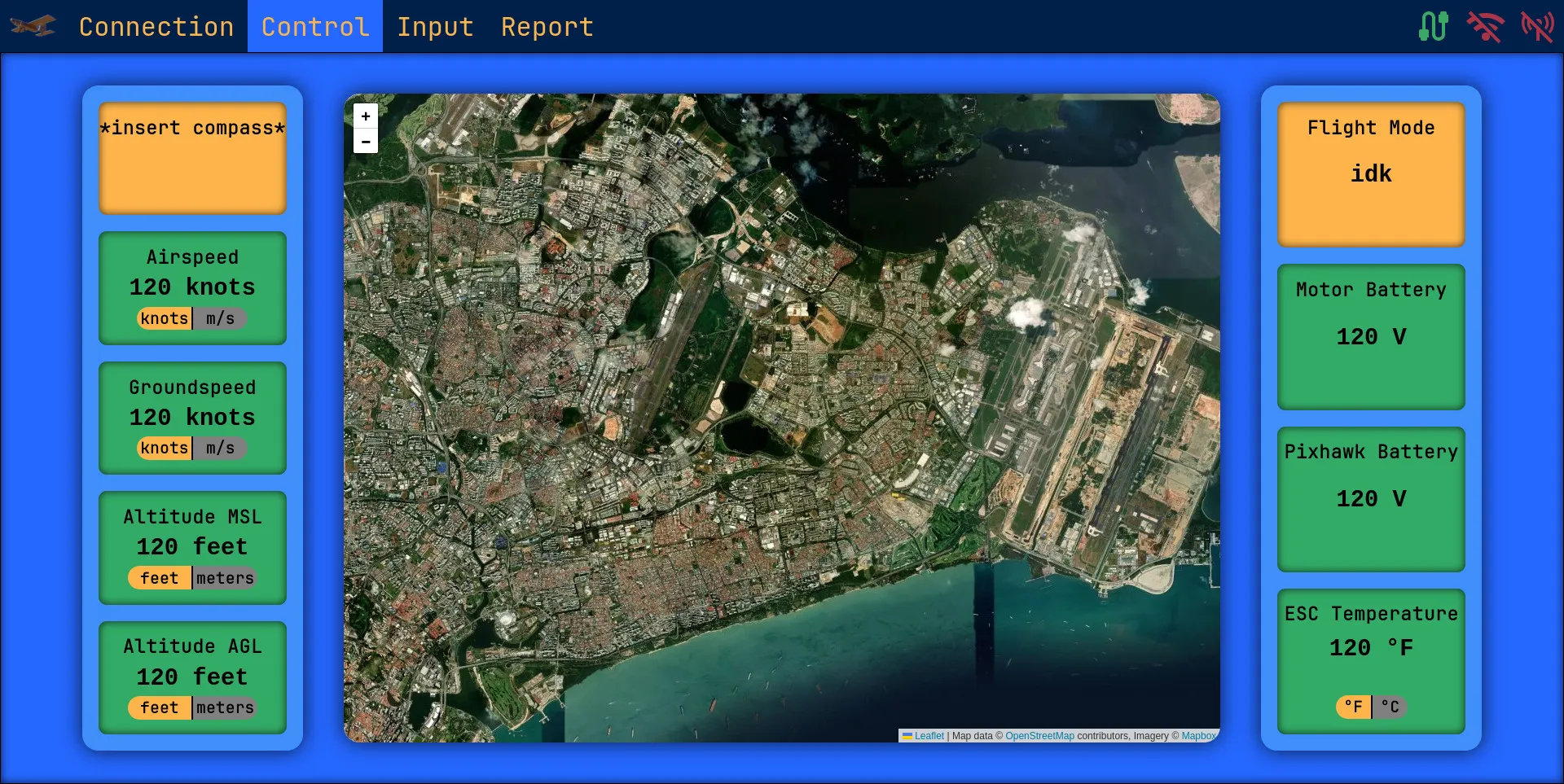
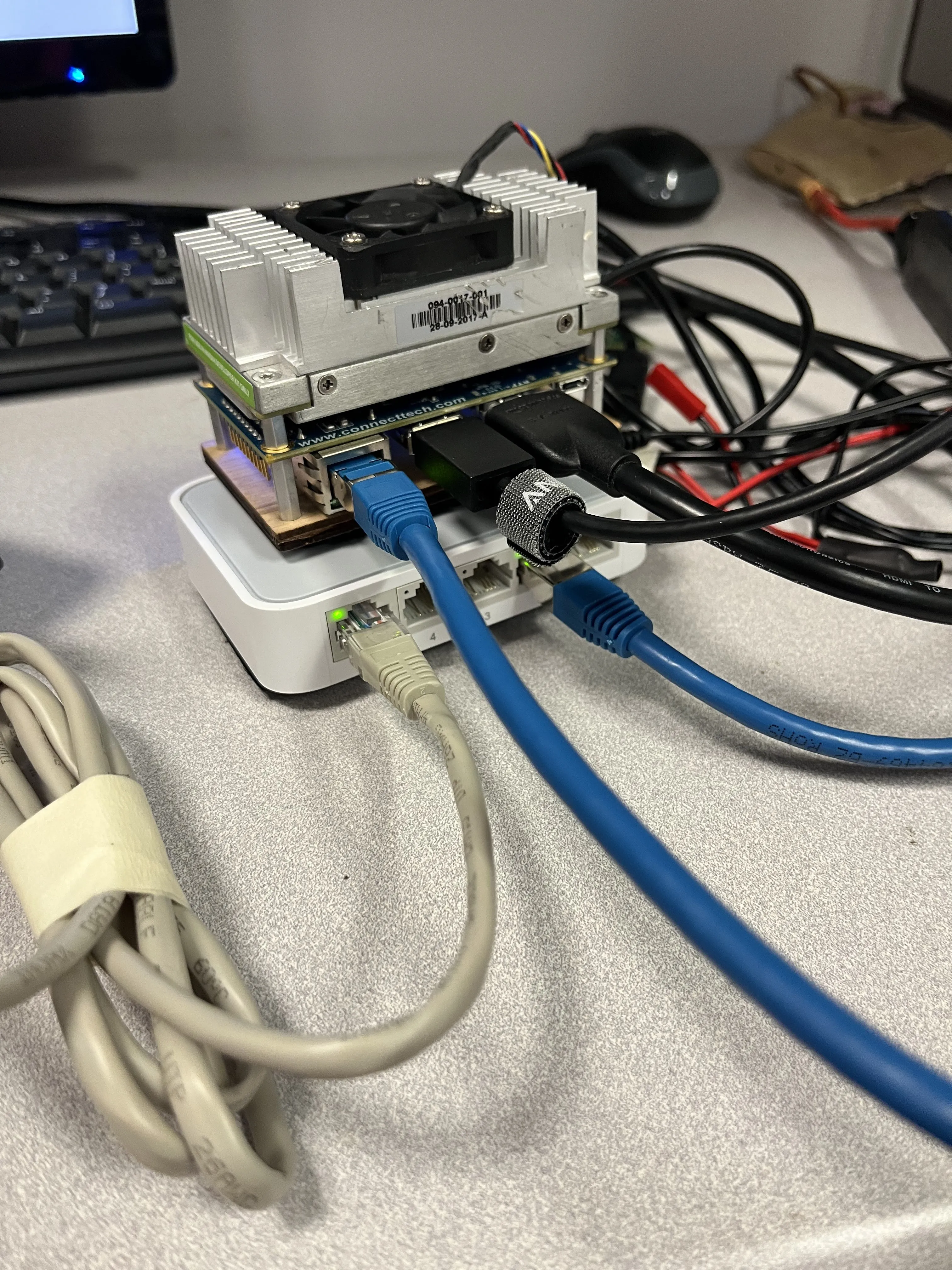
The payloads on the aircraft consist of a Jetson Orin Nano onboard flight computer, a RaspberryPi based camera system, and a strobe beacon with a custom designed parachute and release mechanism. The Jetson onboard computer handles waypoint pathing, autonomous mission orchestration, and computer vision tasks.

Watch Our Drone in Action
Stickbug (2023-2024)

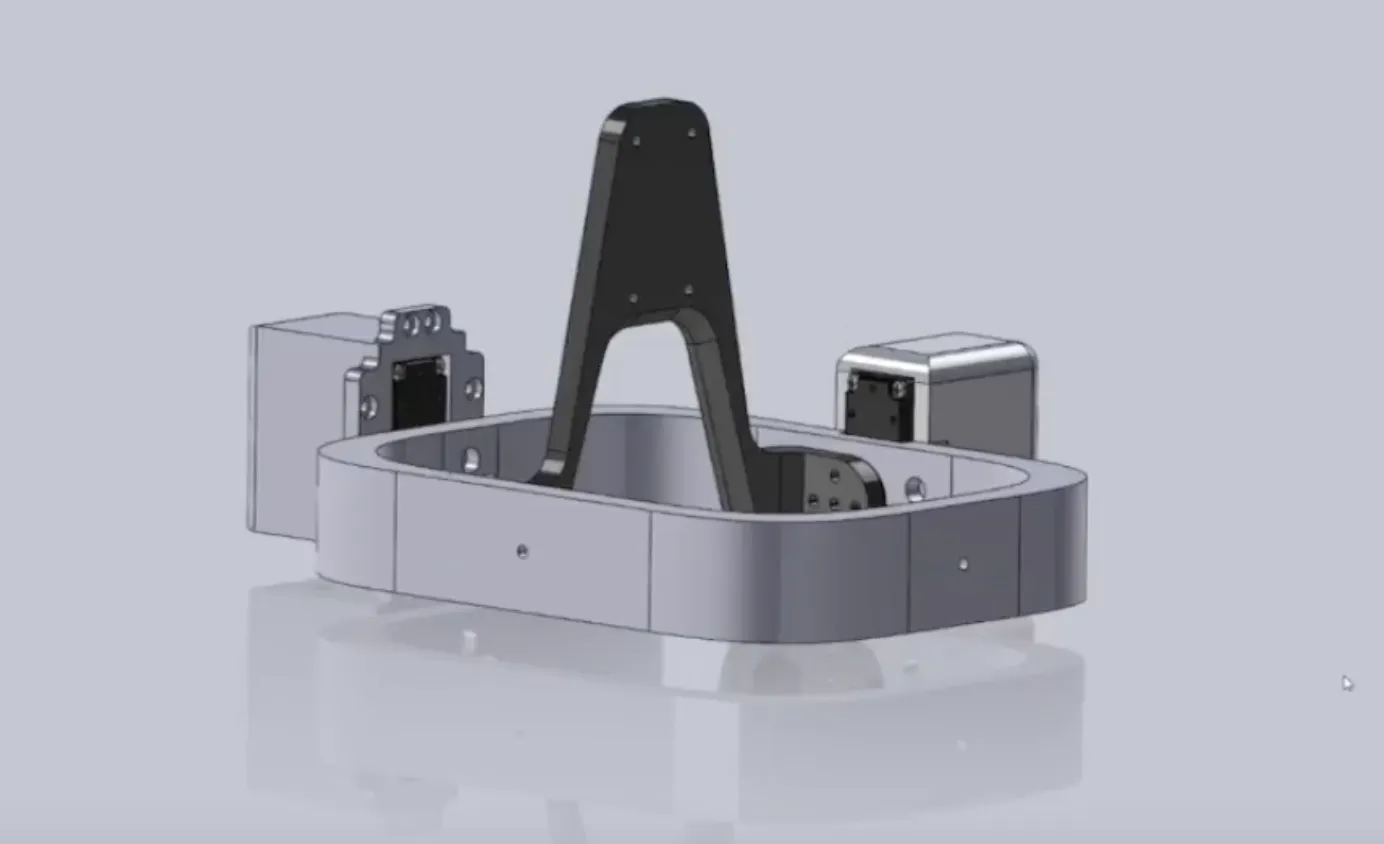
The Stickbug is a VTOL (Vertical Take-Off and Landing) fixed-wing aircraft designed to fulfill competition requirements including autonomous waypoint missions and payload drop operations. Its configuration allows for quick autonomous takeoff and landing up to 75 ft altitude, with an 8.5-foot wingspan to increase aerodynamic efficiency in forward flight. The aircraft is built primarily from lightweight composites including carbon fiber, fiberglass, and wood, meeting the 55 lbs maximum takeoff weight requirement.
The propulsion system consists of five Sunny Sky X6215S 170KV motors. Four motors are located on two tail booms in a stable square orientation for VTOL, each providing over 18 pounds of thrust with 22x6.5-inch propellers. A Scorpion S2 5525 170KV motor at the rear fuselage supplies forward thrust with a 20x10-inch propeller, capable of approximately 20 pounds of thrust.
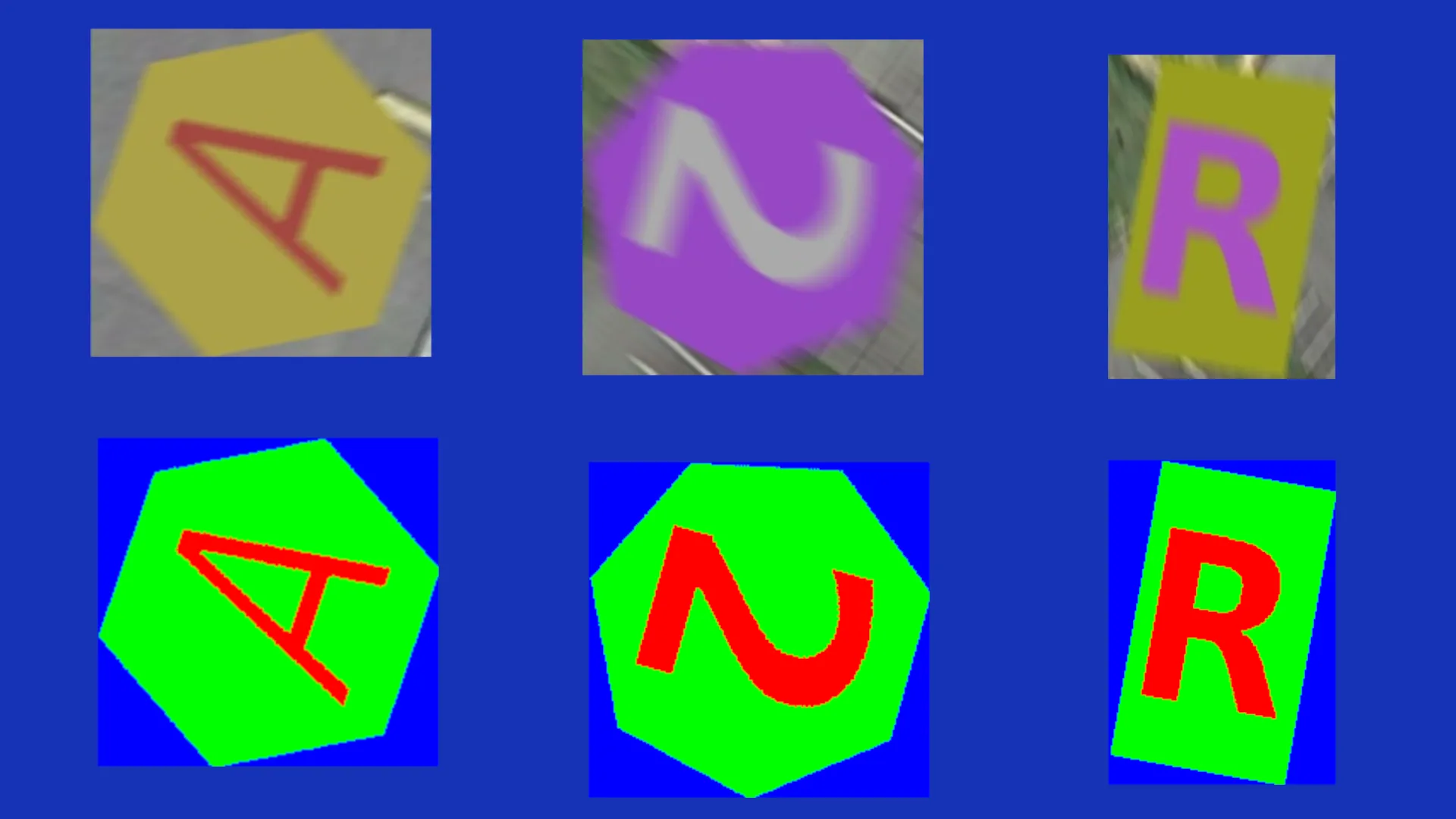
The aircraft systems include a Cube Orange flight controller running ArduPlane for robust manual and autonomous control. The NVIDIA Jetson Orin Nano onboard computer handles mission logic, dynamic path planning, and integrates subsystems like the camera gimbal and airdrop system. The payload system features a Lucid Triton 200S camera with a 20-megapixel sensor and 50mm lens, mounted on a custom 2-axis brushless gimbal for precise target identification.