Our teams across Airframe, Embedded, Software, and Business have been on an electrifying ride, delivering phenomenal results and great progress this Fall. From hands-on manufacturing and design projects in Airframe to the crucial engineering development in Embedded and Software, plus the Business team’s dynamic fundraising feats, it’s been a quarter of non-stop action, innovation, and team building. Here’s a snapshot of how each team soared to new heights, pushing the limits of creativity and engineering excellence!
Airframe
Fall quarter for Triton UAS’s airframe subteam was nothing short of a complete success. These past ten weeks have been a unique new start for the subteam that has been fast paced, exciting, and extremely hands on.

This year is the first year that the Triton UAS airframe team has done an onboarding project. With the completion of a fully composite airfcraft, new members are familiar with the manufacturing practices that will be used to build the yearly competition aircraft. Starting from scratch, all team members were able to acquire direct hands-on manufacturing experiences as they manufactured and assembled the aircraft over the duration of the quarter along with becoming familiar with all aircraft component nomenclature and developing basic aerospace flight intuition. Such hands-on experience included exposing members to composites layup procedures, proper bonding and assembly sequences, and hardware operations including laser and hot wire cutters. With the completion of the onboarding aircraft within the first quarter, all members have acquired a strong aeronautical engineering base that will allow them to contribute to the design and manufacturing of highly technical components that will be implemented into the competition aircraft moving into winter quarter.

With the onboarding aircraft complete, we are excited to delegate the aircraft’s operations to our embedded and software subteams for onboard component testing during the coming winter quarter as the airframe team will be working full force on competition aircraft design, manufacturing, and testing. Doing so will allow for the fellow subteams to test their competition grade components whilst the physical airframe is still under construction, thus allocating more time for iteration before our competition arrives in June.
Embedded
Over the course of the fall quarter, leads and members alike on the Embedded subteam have made significant progress on all projects, and as such have grown skills in PCB design, embedded programming, soldering, wire fabrication, and other essential electronics skills.
For their onboarding project, members got to take apart the old signals board and put it back together better than ever. This involved lots of soldering practice and Arduino code refactoring. Members used the MAVLink library to add two more thermistors to the signals board, which puts us in a good position to wrap up the signals board at the beginning of winter quarter by adding a current sensor for the electronic speed controller which drives our motor. Monitoring the ESC’s current will allow us to detect any potential power problems during flight. Once we get current sensing working, we will evaluate if there are other tasks the signals board can take on for the new aircraft or if we can split off into new projects.
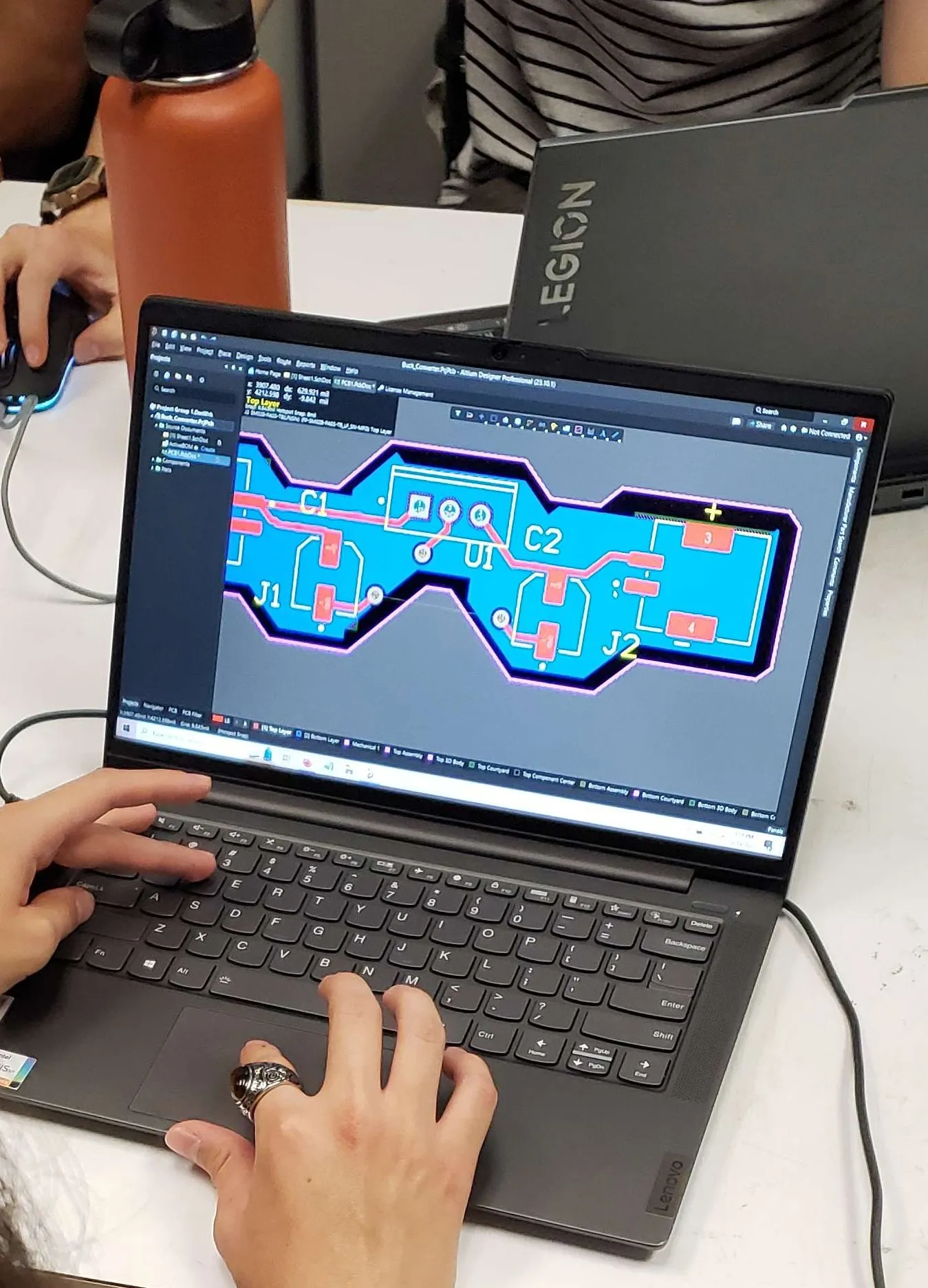
Back in September, many of us working on the power distribution board did not have any experience with designing PCBs at the scale of our competition plane. Initially the process was quite slow for us as we learned our way around Altium Designer and while we were incorporating each IC. However, now that we are more familiar with this process it has been exciting to see our original idea starting to come to fruition. By next quarter we hope to have the PCB shipped to our lab for testing.
Meanwhile, our research into developing a new guided payload & antenna tracking system has been going smoothly. Members have learned how to work with the ESP32 microprocessor and have been able to establish a working WiFi connection to our ground control station. We also have been able to control servo motors via a Bluetooth connection, and we are working on translating this control logic to WiFi. The next steps for us here are to develop the parachute control algorithm and figure out how to send data over WiFi such that our antenna tracker no longer needs to be connected over Ethernet.
Overall, it has been an absolute pleasure this quarter to see so many faces new to Triton UAS grow their skills while working on our Embedded projects. We are excited to see what will come of the Embedded subteam in the following quarters, as many of the designs that we created will be able to be fabricated and tested in preparation for the competition.
Software
This past quarter, the software team has split its efforts between training of new members and continuing work on our existing projects.
There are several technologies used at TritonUAS that are widespread in the general software industry. The software team held six in-depth workshops to introduce and teach new members to these technologies/tools. We covered topics such as the Unix command line, Git, GitHub, HTTP, REST, Docker, Pointers and Memory Management. These workshops were designed to be as beginner friendly and hands on as possible. They assume little prior knowledge on the topic and guide members in an interactive manner. The software team also facilitated a few onboarding projects to get members up to speed on programming languages they might be unfamiliar with. We had members create a terminal-based hangman game in languages such as C++ or Go. Both the workshops and onboarding projects are initiatives that are new to the software team this academic year. Looking back, we have seen them to be effective in getting new members familiar with the technology we use. We hope to expand our workshops and onboarding projects in the future and use feedback from this quarter to improve existing ones.
With regards to development of the software system, the team made large strides towards achieving our competition goals. This quarter, we lept headfirst into the redesign of the software that runs on our on-board computer, the Jetson Orin Nano. This software is mission critical as it is responsible for generating the waypoint path that the plane will autonomously fly, communicate with hardware on the plane, and transmit data back to the ground. This quarter we chose to rethink how we had structured the on-board computer software and have also rewritten it in C++. With the rewrite, we have made progress in implementing the RRT* path planning algorithm, a client to communicate with the LUCID Triton 200S camera, infrastructure to run our computer vision pipeline, a client to communicate with the Pixhawk flight controller, and much more.
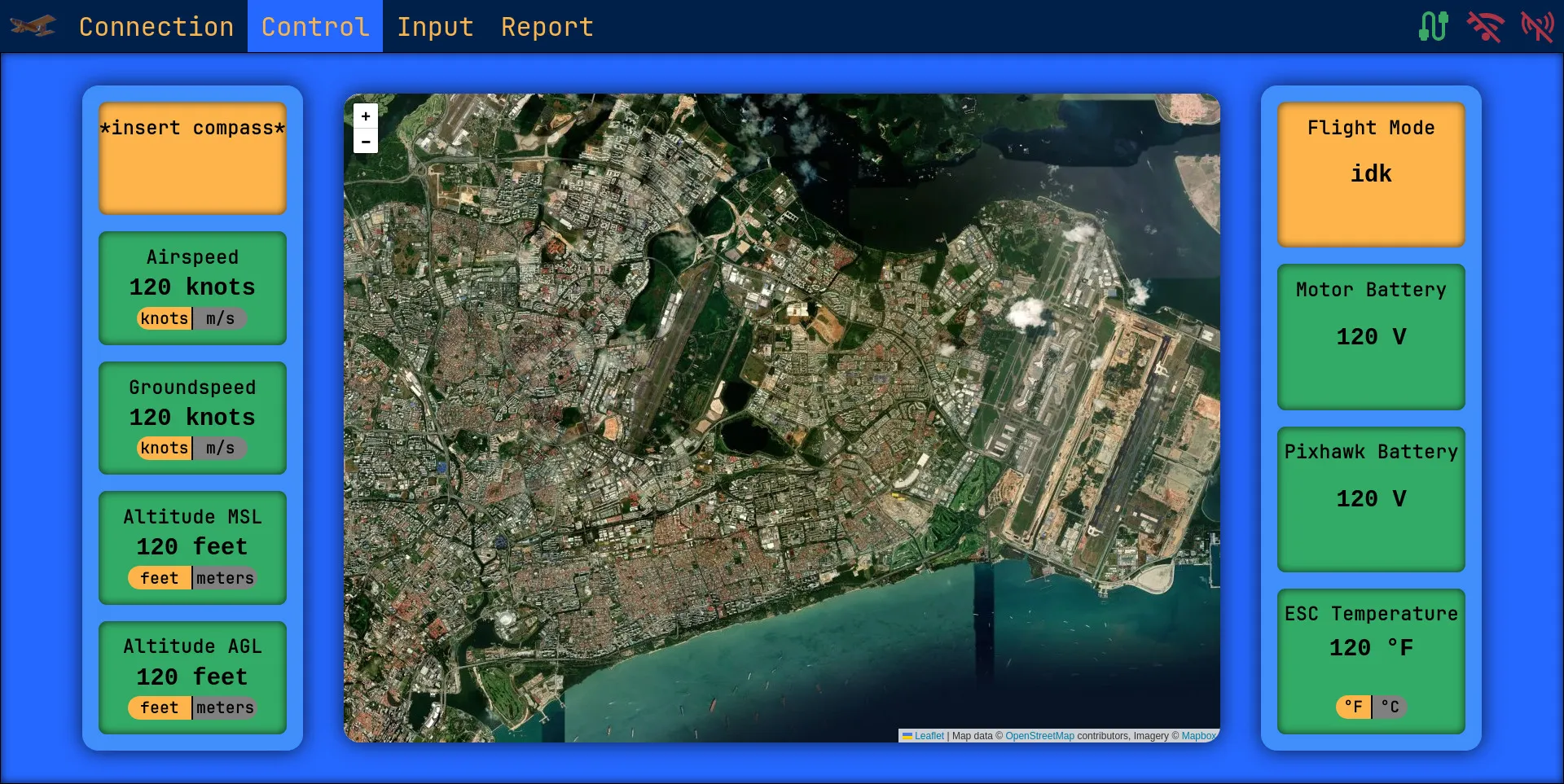
On the software for the ground control station (GCS), we have been hard at work with a redesign of our frontend web application. The web application is a crucial part of our system since it is the medium which a human operator interfaces with our system. One can monitor the status of the mission, position of the plane, vital sensor readings, incoming images from the camera, and much more. This year, the software team has chosen to implement the GCS frontend using the React framework. So far, the team has produced several pages to monitor and control parts of the mission. The pages have been designed to be easy to use while responsive to various screen sizes and visually appealing at the same time. On the backend of the GCS, we have been implementing a new feature to allow us to save flight logs to persistent storage even after the mission has ended. Future work on the GCS includes finishing the connections between the backend to the frontend and on-board computer.
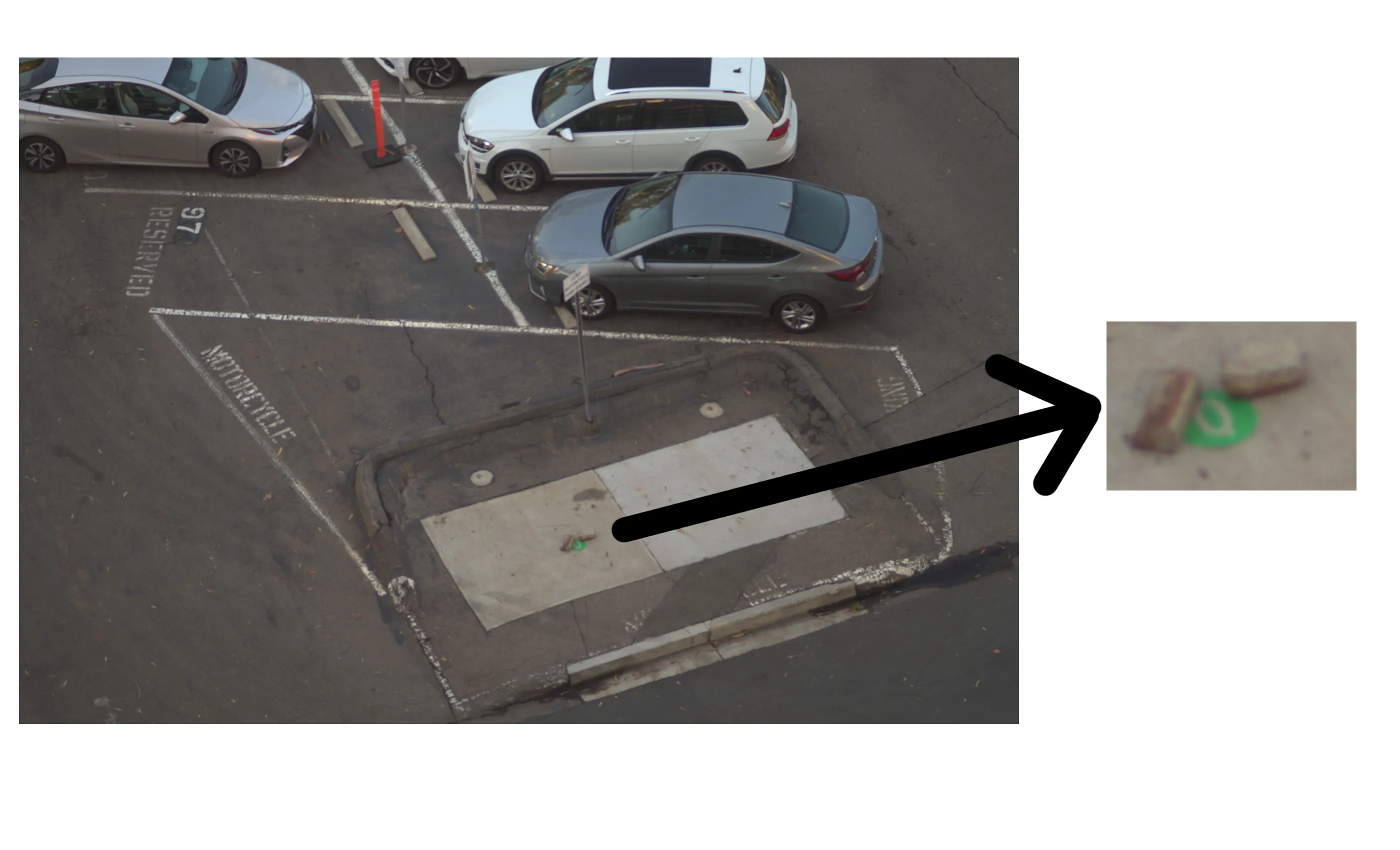
The software team also took a deep dive to evaluate our computer vision and imaging systems. We have implemented a more robust set of benchmarks to measure the performance of our object detection model. This model is responsible for detecting the competition objectives that are placed on the ground. With this new set of metrics, we are better able to identify which types of targets the model struggles to detect and are planning to work on beefing up our training dataset. There has also been work to create a formal testing environment for our localization software. Localization is responsible for taking the targets we detect and assigning them real geolocation coordinates. We have set up a Blender world and an accompanying Python script (using the Blender Python API) to simulate real images taken by the camera and to capture the measurements that we should expect. Using this configuration, we have been able to identify issues in our previous localization implementation and are currently working on fixes. With regards to our imaging system, as mentioned in our mid-quarter blog post, we have run into several issues when using our camera, the LUCID Triton 200S. We dedicated some time this quarter to understanding how the camera and its auto-exposure/gain algorithms work. As a result, we have been able to tweak the camera’s parameters to have significantly clearer and more consistent images. With this new knowledge, we hope to perform more testing with the camera and put it to the test on more flights.
Business
This past quarter, the Business team has made progress towards gaining sponsors for our team, organizing fundraisers with restaurants on campus as well as building our team spirit and creating an exciting environment for new members.
This quarter, we had a total of 6 fundraisers, four at Tapioca Express and two at Yogurtworld on UCSD campus, allowing us to raise on average $50 per fundraiser. The additional funds from these partnerships will supplement our club’s finances and take care of material costs as we build our competition aircraft. Besides providing additional club funds, these fundraisers have been great social events as well! Everyone loves an excuse to get together and get frozen yogurt or boba. By planning our fundraisers after our biweekly town hall meetings, it gives members an opportunity to socialize with other subteams and intermingle. Through having more fun activities, it gives members something to look forward to as well as helping the team become closer to one another. Due to the success of these fundraisers, the business team has scheduled more fundraisers both on and off campus for winter quarter at locations such as Chipotle, SomiSomi as well as continuing with on campus locations.

In addition to our combined fundraiser/social events, we hosted our first ever pumpkin decorating Halloween social and designed custom stickers to hand out to members. We hope to continue hosting socials and events for our members in the Winter quarter, and building team spirit and unity remains a top priority for the Business team.
Next quarter, we hope to further develop our relationships with corporate sponsors, continue raising money through fundraisers, and continue planning fun social events for our members to enjoy!
Looking Ahead
Looking ahead, it is imperative that we move quickly and iterate on our designs and systems in the upcoming quarter as we plan to spend several months in the Spring solely focusing on flight testing, data collection, and perfecting our aircrafts performance before the competition in June.
We plan to hit the ground running at the start of Winter quarter where the Airframe team will begin manufacturing the full-scale competition plane and the Embedded and Software teams will work to integrate and test their systems on our capable new onboarding aircraft.
Over Winter break, team members onsite in San Diego have been preparing our large 3-D printed molds, which are printed in pieces and then brought together to form our competition aircraft’s fuselage, wings, and tail. Members of the Software, Embedded, and Business subteams have been working in the background on key infrastructure and operations to ensure that all members can jump straight into engineering the competition plane. We are excited to see our newer team members put their recently developed skills to work after a successful Fall quarter of learning and building!
