
After a year of hard work the UCSD AUVSI team went to Maryland with our backup plane to compete and to show off the work we accomplished during the school year. The competition pits 30 schools from around the world During the mission demonstration we were able to fly and complete image reconnaissance. Even when losing GPS lock during flight we were able to continue flying and complete the mission. The flight was a good learning experience on what we need to do in the future to be able to adapt to different mission configurations such as very large obstacles.

Overall we ended up placing 11th out of the 50 teams who were accepted and the 25 who attended. The strongest component of our score was our 3rd place technical paper.
To learn more about the competition visit the competition website
2016-2017 Goals
Coming into the 2016–2017 school year we are excited to improve on our previous results and have a strong base to build upon.
Airframe
We have already begun manufacturing of a new composite plane that should be ready for flight testing by the end of the 2016. In addition to the body of the aircraft, the team is tasked with designing several interior components necessary for the competition, this includes: a gimbal, a launcher, and a water bottle dropper. Besides manufacturing multiple carbon fiber airplanes for this years competition and flight testing, the airframe team is attempting to design a next generation aircraft that utilizes VTOL.

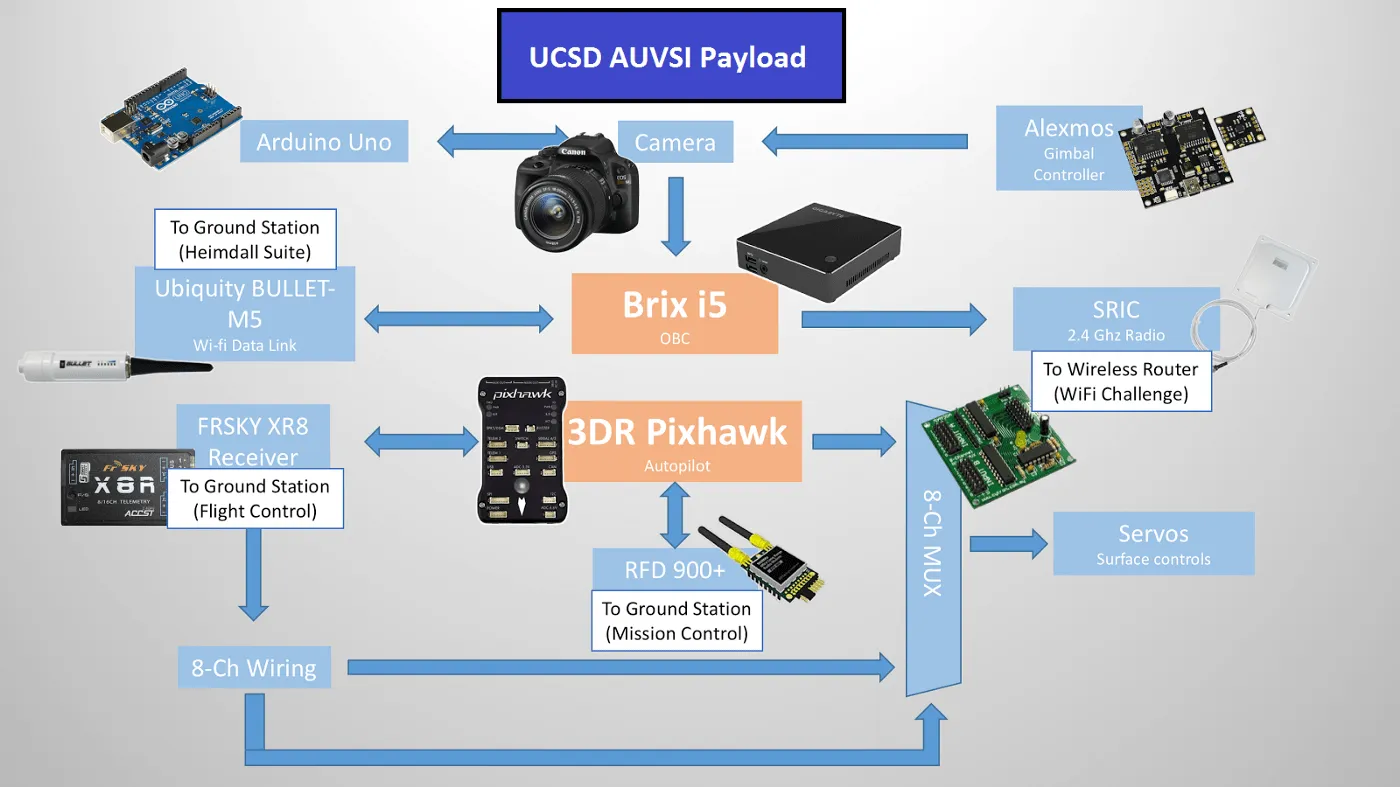
Embedded
The Embedded team is working on improving the connectivity and radio system to integrate it seamlessly into the new composite air frame. A new on board power system design will vastly streamline our flight testing processes. It will also integrate with the on board computer for better remote configuration and autonomous operation. Further autonomy will be achieved through autonomous takeoff via a launcher and autonomous landing made possible by more precise sensors.
Software
The Software team is working on building a web based ground control station that will allow us to have full control over the exact functionality that is needed for the SUAS competition. We are redesigning our dynamic path planning system to be distributed and utilize algorithms from recent research papers. Our computer vision system is being iterated on as we continue to incorporate more deep learning into the pipeline.

We have already started flight testing using our backup flight platform.

Building a new airplane and tackling challenging problems such as automatic landing, dynamic path planning, and robust computer vision will lead to a packed year of challenges. It is great to see a group of students with diverse backgrounds ranging from Computer Science and Electrical Engineering to Structural and Aerospace Engineering and even Physics work together towards a common goal. We plan to use this blog to document our progress and dive deeper into some of the technical challenges different groups are working on.